1.モーターの分類と特徴
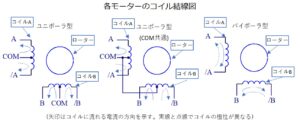
2相ステッピングモーターは固定側のコイルがAとBの2つあり、
巻き方により「ユニポーラ型」と「バイポーラ型」に分類されます。
それぞれ制御するドライバーも異なります。
ユニポーラ型
巻線の中点から共通端子(COM)が設けられており、通常はここをモーター電源の+に接続し、
ドライバーにより各コイルに電流を流すことで極性を制御し、ローターを回転させます。
バイポーラ型
巻線が各コイル、単一に巻かれており、ドライバーにより 電流の向きを反転させることで
コイルの極性を変え、ローターを回転させます。
ユニポーラ型はバイポーラ型と比較し、動作時はコイル全体の半分しか使いません。
バイポーラ型は、動作時にコイル全体に電流が流れるのでユニポーラ型より高トルクになります。
但し、インダクタンスはユニポーラ型の方が小さく、高速では高トルクとなります。
同じ大きさ、同じ巻き数のモーターだと、一般に低速ではバイポーラ、高速ではユニポーラが高トルクになります。
モーターの特徴まとめ

2.モータードライバーの特徴
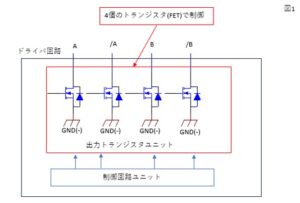
ユニポーラモータードライバー回路
4個のトランジスタ(FET)で各コイルのON-OFF制御を行います。(図1参照)
(注意)
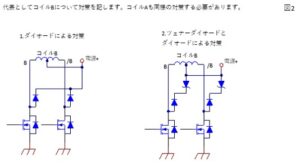
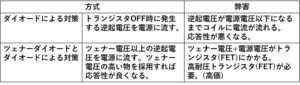
このままでは、コイルがONからOFFになったときに発生する逆起電圧が逃げる回路がありません。
抑制する回路を設けることが必要です。(図2参照)
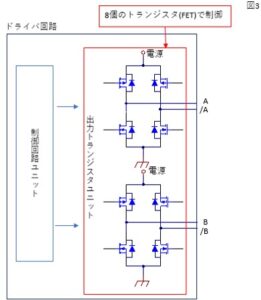
バイポーラモータードライバー回路
各コイルに電流を双方向に流すので、8個のトランジスタ(FET)でHブリッジを構成して制御します。(図3参照)
ユニポーラモーター用ドライバーより複雑になります。
逆起電圧も発生しますがトランジスタ(FET)のボディダイオードを通り、電源に流れますので対策は不要となります。
これにより、出力トランジスタの耐圧は低いものが使えます。
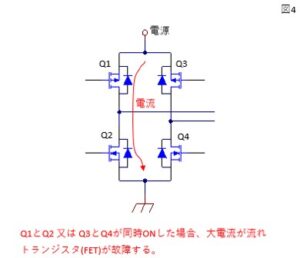
(注意)
Hブリッジでモーターを制御するので上段と下段のトランジスタ(図4の Q1とQ2 又は Q3とQ4)が
同時にONしないようコントロールが必要です。(図4参照)
また、上段と下段は特性が揃ったものを使用する必要があります。
モータードライバーの特徴まとめ
