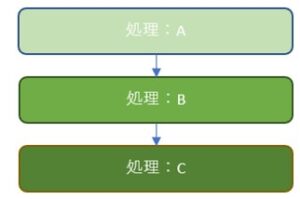
マイコンは複数のことを同時に処理できる訳ではありませんので、複数の処理を行う場合は
順番に行う必要があります。
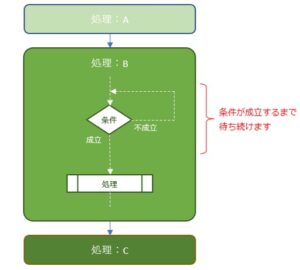
ここで、例えば 処理:B 内で条件が不成立の場合は処理を行わず、条件が成立するのを待ち続けたとします。
リアルタイム性とは
”入力情報に合わせて、素早く出力処理を行う” こと
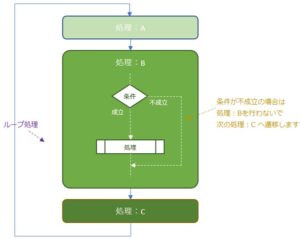
そこで、リアルタイム性を確保する為、以下の2つの対応を行います。
1)ループ処理にする
処理:A~C を順番に何回も呼び出すループ処理にします。
2)条件が不成立の場合は、次の処理へ遷移
処理内で条件が不成立の場合は、条件が成立するまで待ち続けるのではなく
処理を行わない経路を通り次の処理へ遷移します。
ループして処理が呼び出される都度、条件の成立/不成立により処理を行うか判断します。
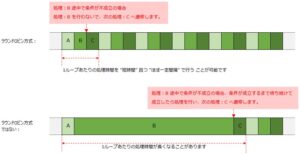
このような方式を、ラウンドロビン方式 といいます。
そして ”ラウンドロビン方式” + ”処理を高速で行う” ことで、リアルタイム性を確保します。
”処理を高速で行う” = 短時間 で行うことで、複数の処理をリアルタイムで実行可能です。